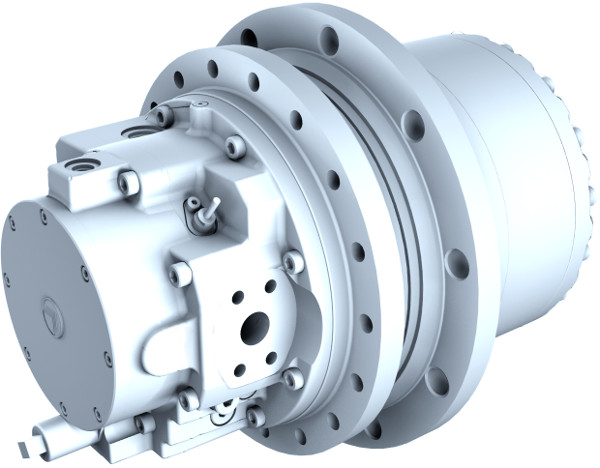
 Con un diámetro de tan solo 4 milímetros y una gran potencia, este motor brushless será muy bien recibido en el sector de la tecnología médica. Los motores brushless están disponibles en longitudes M y L, y alcanzan velocidades de hasta 50.000 rpm. Los reductores adecuados para estos motores brushless son los GPX 4 C, disponibles en versiones de 2, 3 y 4 etapas. En los reductores planetarios se ha optimizado el ángulo de ataque del engranaje para lograr tiempos de funcionamiento más largos.
Con un diámetro de tan solo 4 milímetros y una gran potencia, este motor brushless será muy bien recibido en el sector de la tecnología médica. Los motores brushless están disponibles en longitudes M y L, y alcanzan velocidades de hasta 50.000 rpm. Los reductores adecuados para estos motores brushless son los GPX 4 C, disponibles en versiones de 2, 3 y 4 etapas. En los reductores planetarios se ha optimizado el ángulo de ataque del engranaje para lograr tiempos de funcionamiento más largos.
El encoder incremental ENX 4 MAG amplía las posibilidades del motor brushless, por ejemplo, para su utilización en robots quirúrgicos. MAG es la abreviatura de magnético. En este tamaño, el encoder ENX 4 MAG es toda una novedad en el mercado. Utiliza el mismo principio magnético de funcionamiento que las variantes de mayor tamaño ENX 6 MAG y ENX 8 MAG.
Otra novedad es la electrónica de control de posición EPOS4 Micro 24/5 en su versión EtherCAT. En lo que a funcionalidad, manejo, software y accesorios se refiere, este controlador de posición se integra a la perfección en la familia de productos EPOS4 ya existentes. Es adecuado para su uso tanto con motores DC como con motores brushless con una potencia en continuo de hasta 120 W. Además, ofrece una gran cantidad de posibilidades de feedback, como sensores Hall o encoders incrementales digitales y encoders absolutos SSI. Con su diseño compacto, el controlador de movimiento es la solución óptima para la integración en sistemas de uno o varios ejes, como por ejemplo en aplicaciones de reducido tamaño y en sistemas robóticos. 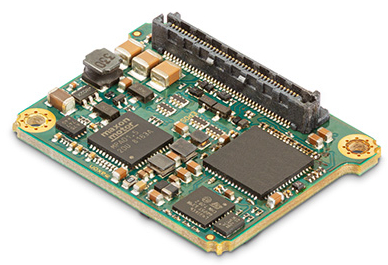
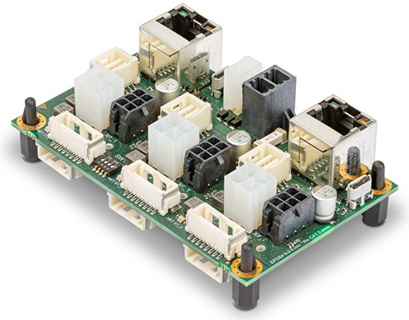
Además del nuevo tamaño Micro, en el verano de 2020 le seguirá el EPOS4 Compact 24/5 EtherCAT 3- axes, un sistema de posicionamiento para 3 ejes compacto y listo para su instalación. Este sistema de posicionamiento para 3 ejes se basa en el EPOS4 Micro y demuestra que este tipo de soluciones multieje pueden ser muy pequeñas y, al mismo tiempo muy funcionales.