Piensa rápido, robot

Una de las razones por las que todavía no tenemos los coches con piloto automático y mini-helicópteros que entregan las compras online es que los vehículos autónomos no suelen funcionar bien bajo presión. Un sistema que puede perfectamente aparcar en paraalelo a 5 mph puede tener problemas para evitar obstáculos a 35 mph.
Parte del problema es el tiempo que toma para producir e interpretar los datos de la cámara. Un vehículo autónomo utilizando una cámara estándar para monitorear su entorno necesitaría alrededor de una quinta parte de un segundo para actualizar su ubicación. Eso es suficiente para las condiciones normales de funcionamiento, pero no lo suficientemente rápido para gestionar lo inesperado.
Andrea Censi, científico investigador en el Laboratorio del MIT para la Información y Sistemas de Decisión, cree que la solución podría ser la de complementar las cámaras con un nuevo tipo de sensor “basado en eventos” (o "neuromórficos"), que puede tomar mediciones a un millón de veces por segundo.
En la Conferencia Internacional de Robótica y Automatización de este año, Censi y Davide Scaramuzza de la Universidad de Zurich presentan el primer algoritmo de estimación de estado - el tipo de algoritmo que los robots utilizan para calibrar su posición - para procesar los datos de los sensores basados en eventos. Un robot que ejecuta su algoritmo podría actualizar su ubicación en cada milésima de segundo más o menos, lo que le permite realizar maniobras más ágiles.
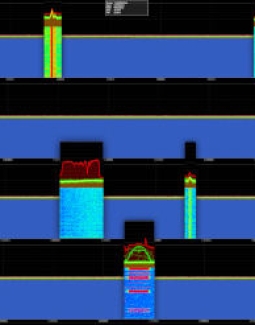
"En una cámara normal, usted tiene una serie de sensores, y luego hay un reloj", explica Censi. "Si usted tiene una cámara de 30 fotogramas por segundo, cada 33 milisegundos del reloj se congelan todos los valores y, a continuación, los valores se leen en orden." Con un sensor basado en eventos, por el contrario, "cada píxel actúa como un sensor independiente ", dice Censi. "Un cambio en la luminosidad - ya sea en la dirección positiva o negativa - es mayor que un umbral del píxel que dice”'yo veo algo interesante" y comunica esta información como un evento. Y luego espera hasta que percibe otro cambio".
Evento destacado
Cuando un algoritmo de estimación de estado estándar recibe una imagen de una cámara montada en el robot, primero se identifican "características": graduaciones de color o tono que se necesitan para conocer los límites entre los objetos. Luego se selecciona un subconjunto de las características que considera poco probable que cambie mucho con nuevas perspectivas.
Treinta milisegundos más tarde, cuando la cámara dispara de nuevo, el algoritmo realiza el mismo tipo de análisis y comienza tratando de igualar características entre las dos imágenes. Este es un proceso de ensayo y error, lo que puede llevar a cualquier lugar de 50 a 250 milisegundos, dependiendo de cómo ha cambiado dramáticamente la escena. Una vez que ha emparejado características, el algoritmo puede deducir de sus cambios de posición hasta qué punto el robot se ha movido.
El algoritmo de Censi y de Scaramuzza complementa los datos de la cámara con hechos denunciados por un sensor basado en eventos, que fue diseñado por su colaborador Tobi Delbrück del Instituto de Neuroinformática en Zurich. Primera ventaja del nuevo algoritmo es que no tiene que identificar las características: Cada evento es intrínsecamente un cambio de luminosidad, que es lo que define a una característica. Y debido a que los eventos se reportan tan rápidamente - cada millonésima de segundo - el problema de la concordancia se hace mucho más simple. No hay tantas características candidatas a ser consideradas, porque el robot no puede haberse movido muy lejos.
Por otra parte, el algoritmo no intenta hacer coincidir todas las características de una imagen a la vez. Para cada caso, se genera un conjunto de hipótesis acerca de hasta qué punto el robot se ha movido, lo que corresponde a varias funciones candidatas. Después de que bastantes acontecimientos se han acumulado, simplemente selecciona la hipótesis que se convierte en imagen con más frecuencia.
En los experimentos que implican un robot con una cámara y un sensor basado en eventos montado en el mismo, su algoritmo resultó ser tan preciso como los algoritmos de estimación de estado existentes.
Llegando abordo
Una de las inspiraciones para el nuevo trabajo, dice Censi, fue una serie de experimentos recientes por Vijay Kumar de la Universidad de Pennsylvania, que demostró que los helicópteros de cuatro rotores - helicópteros robóticos con cuatro conjuntos de rotores - podría realizar maniobras muy ágiles. Pero en esos experimentos, Kumar mide la ubicación de los robots utilizando una batería de cámaras externas que capturan 1.000 exposiciones por segundo. Censi cree que el suyo y el algoritmo de Scaramuzza permitiría a un helicóptero con cuatro rotores y sensores a bordo, replicar los resultados de Kumar.
Ahora que él y sus colegas tienen un algoritmo de estimación de estado fiable, dice Censi, el siguiente paso es desarrollar un algoritmo de control correspondiente - un algoritmo que decide qué hacer sobre la base de las estimaciones estatales. Ese es el objeto de una continua colaboración con Emilio Frazzoli, profesor de aeronáutica y astronáutica en el MIT.
Escrito por Larry Hardesty, MIT Noticias Oficina
Articulos Electrónica Relacionados
- Sensor de movimiento de 9 ejes... Mouser Electronics, Inc. tiene disponible el sensor de movimiento BMF055 de 9 ejes de Bosch Sensortec. Este MEMS sensor sistema en encapsulado (SIP) es parte de...
- Análisis rápido y preciso del ... La medición precisa de la temperatura es necesaria en aplicaciones de laboratorio como el análisis de la reacción en cadena de la polimerasa (PCR), que se utili...
- CAB 1500, el nuevo ASIL C read... LEM ha anunciado su nuevo sensor de corriente para automoción, el CAB 1500, que es conforme a ASIL C e ISO 26262. El CAB 1500, que ofrece la mejor exactitud de ...
- PVS1, sensor de irradiancia so... PVS1 es un sensor de irradiancia solar basado en tecnología fotovoltaica. Instalado con la misma inclinación y azimut de los módulos fotovoltaicos, mide l...
- Sensor de temperatura de infra... RS Components (RS), marca comercial de Electrocomponents plc, ha presentado el sensor de temperatura de infrarrojos de RS PRO, un sensor de salida de voltaje si...
- Fotocélulas miniatura con pote... La serie PD30 Basic cubre una amplia variedad de principios de detección: reflexión sobre objeto, supresión de fondo, reflexión sobre espejo con y sin polarizac...
- Sensores inductivos planos y r... Los sensores inductivos IQ flat de SICK se caracterizan por un diseño plano con una estructura altamente resistente, además de un montaje sencillo y ser adecuad...
- Sensor capaz de distinguir per... Masermic ha desarrollado un dispositivo en el que Tekniker aporta sus conocimientos y experiencia en el diseño y desarrollo de hardware electrónico, sensores óp...
- Gama de sensores Amphenol, The... RS Components (RS), marca comercial de Electrocomponents plc ha anunciado la disponibilidad de una completa oferta de sensores avanzados utilizados por los sist...
- Sensor de temperatura con abra... Farnell distribuye esta solución para medida de temperatura no invasiva, el sensor de temperatura HANI™ con abrazadera de Omega Engineering. El HANI está dispo...
- SIL2/SIL3, el nivel de segurid... Los vehículos de guiado automático (AGV) y a los robots móviles autónomos (AMR) no disponen de supervisión humana directa. Para proteger el medio ambiente, las ...
- Sensores inerciales MEMS de al... Farnell element14 ha ampliado su cartera de soluciones de detección inercial con la gama completa de giroscopios MEMS de alto rendimiento de Tronics Micr...