Una forma más fácil de enseñar a los robots nuevas habilidades


Un robot de almacén recoge tazas de una estantería y las coloca en cajas para su envío. Todo va viento en popa, hasta que el almacén procesa un cambio y el robot tiene que coger tazas más altas y estrechas que se almacenan al revés Para reprogramar el robot hay que etiquetar a mano miles de imágenes que le enseñen a coger estas nuevas tazas y volver a entrenar el sistema.
Pero una nueva técnica desarrollada por investigadores del MIT sólo requeriría un puñado de demostraciones humanas para reprogramar el robot. Este método de aprendizaje automático permite al robot coger y colocar objetos nunca vistos que se encuentran en poses aleatorias con las que nunca se ha encontrado. En 10 ó 15 minutos, el robot estará listo para realizar una nueva tarea de recogida y colocación.
La técnica utiliza una red neuronal diseñada específicamente para reconstruir las formas de los objetos en 3D. Con sólo unas pocas demostraciones, el sistema utiliza lo que la red neuronal ha aprendido sobre la geometría 3D para agarrar nuevos objetos similares a los de las demostraciones.
En simulaciones y utilizando un brazo robótico real, los investigadores demuestran que su sistema puede manipular eficazmente tazas, cuencos y botellas nunca vistas, dispuestas en poses aleatorias, utilizando sólo 10 demostraciones para enseñar al robot.
"Nuestra principal contribución es la capacidad general de proporcionar de forma mucho más eficiente nuevas habilidades a los robots que necesitan operar en entornos más desestructurados en los que podría haber mucha variabilidad. El concepto de generalización por construcción es una capacidad fascinante porque este problema suele ser mucho más difícil", afirma Anthony Simeonov, estudiante de posgrado en ingeniería eléctrica e informática (EECS) y coautor del artículo.
Simeonov escribió el artículo junto con Yilun Du, estudiante de posgrado de EECS; Andrea Tagliasacchi, investigador científico de Google Brain; Joshua B. Tenenbaum, profesor de desarrollo profesional Paul E. Newton de la cátedra de cognición. Newton Career Development Professor of Cognitive Science and Computation en el Departamento de Ciencias Cognitivas y del Cerebro y miembro del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL); Alberto Rodríguez, profesor asociado de la promoción de 1957 del Departamento de Ingeniería Mecánica; y los autores principales Pulkit Agrawal, profesor del CSAIL, y Vincent Sitzmann, profesor asistente entrante de EECS. La investigación se presentará en la Conferencia Internacional de Robótica y Automatización.
Geometría de agarre
Un robot puede estar entrenado para coger un objeto concreto, pero si ese objeto está tumbado de lado (quizá se haya caído), el robot lo ve como un escenario completamente nuevo. Este es uno de los motivos por los que a los sistemas de aprendizaje automático les resulta tan difícil generalizar las nuevas orientaciones de los objetos.
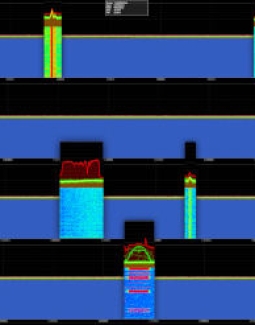
Para superar este reto, los investigadores crearon un nuevo tipo de modelo de red neuronal, un campo descriptor neuronal (NDF), que aprende la geometría 3D de una clase de objetos. El modelo calcula la representación geométrica de un artículo concreto utilizando una nube de puntos 3D, que es un conjunto de puntos de datos o coordenadas en tres dimensiones. Los puntos de datos pueden obtenerse de una cámara de profundidad que proporciona información sobre la distancia entre el objeto y un punto de vista. Aunque la red se entrenó en simulación con un gran conjunto de datos de formas 3D sintéticas, puede aplicarse directamente a objetos del mundo real.
El equipo diseñó la NDF con una propiedad conocida como equidistancia. Con esta propiedad, si al modelo se le muestra una imagen de una taza en posición vertical, y luego se le muestra una imagen de la misma taza de lado, entiende que la segunda taza es el mismo objeto, sólo que girado.
"Esta equivocidad es lo que nos permite manejar con mucha más eficacia los casos en los que el objeto que se observa está en una orientación arbitraria", dice Simeonov.
A medida que el NDF aprende a reconstruir formas de objetos similares, también aprende a asociar partes relacionadas de esos objetos. Por ejemplo, aprende que las asas de las tazas son similares, incluso si algunas tazas son más altas o más anchas que otras, o tienen asas más pequeñas o más largas.
"Si quisieras hacer esto con otro enfoque, tendrías que etiquetar a mano todas las partes. En cambio, nuestro método descubre automáticamente estas partes a partir de la reconstrucción de la forma", afirma Du.
Los investigadores utilizan este modelo NDF entrenado para enseñar a un robot una nueva habilidad con sólo unos pocos ejemplos físicos. Mueven la mano del robot sobre la parte de un objeto que quieren que agarre, como el borde de un cuenco o el asa de una taza, y registran la ubicación de las puntas de los dedos.
Como el NDF ha aprendido mucho sobre geometría 3D y sobre cómo reconstruir formas, puede deducir la estructura de una nueva forma, lo que permite al sistema transferir las demostraciones a nuevos objetos en poses arbitrarias, explica Du.
Elegir un ganador
Probaron su modelo en simulaciones y en un brazo robótico real utilizando tazas, cuencos y botellas como objetos. Su método tuvo una tasa de éxito del 85% en las tareas de coger y colocar objetos nuevos en nuevas orientaciones, mientras que la mejor línea de base sólo pudo lograr una tasa de éxito del 45%. El éxito consiste en agarrar un nuevo objeto y colocarlo en un lugar determinado, como colgar tazas en un estante.
Muchas líneas de base utilizan información de la imagen en 2D en lugar de la geometría en 3D, lo que hace más difícil que estos métodos integren la equidistancia. Esta es una de las razones por las que la técnica NDF funcionó mucho mejor.
Aunque los investigadores están satisfechos con su rendimiento, su método sólo funciona para la categoría de objetos concreta con la que se ha entrenado. Un robot al que se le enseñe a recoger tazas no podrá recoger cajas o auriculares, ya que estos objetos tienen características geométricas demasiado diferentes a las de la red entrenada.
"En el futuro, lo ideal sería ampliarlo a muchas categorías o dejar de lado la noción de categoría", dice Simeonov.
También tienen previsto adaptar el sistema a objetos no rígidos y, a largo plazo, permitir que el sistema realice tareas de selección y colocación cuando el área de destino cambie.
Este trabajo está financiado, en parte, por la Agencia de Proyectos de Investigación Avanzada de Defensa, la Agencia de Ciencia y Tecnología de Defensa de Singapur y la Fundación Nacional de la Ciencia.
###
Escrito por Adam Zewe, Oficina de Noticias del MIT
Articulos Electrónica Relacionados
- Los módulos de potencia de alt... Vicor Corporatio entrevista a OLogic, un grupo dedicado al diseño y el desarrollo integral de robótica, en el podcast Vicor Powering Innovation. OLogic ayuda a ...
- Brazo robótico TinkerKit Bracc... RS Components (RS), marca comercial de Electrocomponents plc distribuye el TinkerKit Braccio, el nuevo brazo robótico controlado por Arduino. Braccio es ...
- Robot Motoman GA50 Yaskawa amplía su cartera de robots industriales con el Motoman GA50, un modelo diseñado para aplicaciones que requieren el máximo grado de precisión y exactitu...
- Pinzas personalizables para ro... On Robot presenta su nuevo modelo de pinza flexible y de bajo consumo para cobots encargados de manipular objetos de diferentes tamaños – la RG6.F&...
- Cobot Igus ReBeL con un engran... El nuevo ReBeL de igus es un cobot de plástico de solo 10 kg que hace viables nuevas ideas innovadoras en materia de robótica de servicio para las start-ups y p...
- Ingenieros diseñan un sistema ... Las estructuras submarinas que pueden cambiar de forma dinámicamente, como hacen los peces, se desplazan por el agua con mucha más eficacia que los cascos rígid...
- Los robots autónomos de seguri... Knightscope, empresa tecnológica de seguridad pública, está especializada en la combinación de robótica, tecnología de conducción automática, electrificación de...
- Robot colaborativo de sobremes... Universal Robots anuncia el lanzamiento de su nuevo modelo UR3, el brazo robótico de sobremesa más pequeño y ligero del mercado diseñado para trabajar junto a o...
- Método que verifica rápidament... Antes de que un robot pueda coger la vajilla de una estantería para poner la mesa, debe asegurarse de que su pinza y su brazo no chocarán contra nada y podrían ...
- El camino hacia la Automatizac... Introducir la automatización robótica en un flujo de trabajo establecido puede parecer complicado y costoso. Con la última tecnología modular y herramientas de ...
- Estación de robótica colaborat... Festo y Universal Robots se unen para crear una nueva estación colaborativa, con el objetivo de impulsar la automatización y la robótica en las aulas y formar a...
- Robots SCARA YK610XE-10 y YK71... Yamaha Motor Europe ha anunciado que añadirá los modelos YK610XE-10 (longitud de brazo de 610 mm) y YK710XE-10 (longitud de brazo de 710 mm) a la serie YK-XE de...